機器人控制器與機器人驅(qū)動舵輪 智能移動的核心協(xié)同

在自動化與智能化浪潮席卷全球的今天,機器人正日益成為工業(yè)制造、倉儲物流乃至服務領域的關鍵角色。而驅(qū)動機器人實現(xiàn)精準、靈活移動的核心硬件,正是機器人控制器與機器人驅(qū)動舵輪。這兩者如同機器人的“大腦”與“強健的雙腿”,共同構成了現(xiàn)代移動機器人(如AGV/AMR)的運動控制中樞,是實現(xiàn)復雜任務和智能導航的基石。
一、 機器人控制器:運動的“智慧大腦”
機器人控制器是機器人系統(tǒng)的指揮中心,本質(zhì)上是一臺高性能的專用計算機。它負責處理來自各類傳感器(如激光雷達、視覺攝像頭、慣性測量單元IMU)的海量數(shù)據(jù),運行先進的導航算法(如SLAM)、路徑規(guī)劃算法和任務調(diào)度程序。
- 核心功能:
- 決策與規(guī)劃:根據(jù)上層指令或自主感知的環(huán)境信息,規(guī)劃出從起點到目標點的最優(yōu)或可行路徑。
- 運動解算與控制:將規(guī)劃出的路徑轉化為具體的運動指令,例如控制每個驅(qū)動輪的速度、轉向角度和加速度。對于舵輪系統(tǒng),這涉及到復雜的運動學正逆解算。
- 多任務協(xié)調(diào):協(xié)調(diào)機器人的移動、避障、充電、與上位系統(tǒng)(如WMS、MES)通信等多種任務。
- 安全監(jiān)控:實時監(jiān)控系統(tǒng)狀態(tài),處理緊急情況(如急停、碰撞檢測),確保運行安全。
- 技術趨勢:隨著AI與邊緣計算的發(fā)展,現(xiàn)代機器人控制器正朝著更開放(基于ROS等系統(tǒng))、更集成(融合視覺、力控等多模態(tài)感知)、算力更強(搭載GPU或?qū)S肁I芯片)的方向演進,以實現(xiàn)更高階的自主決策和自適應能力。
二、 機器人驅(qū)動舵輪:精準的“執(zhí)行雙腿”
驅(qū)動舵輪,又稱“舵輪模組”或“驅(qū)動轉向一體化輪”,是集驅(qū)動(提供前進動力)、轉向(控制行進方向)和承載功能于一體的精密機電裝置。它是移動機器人實現(xiàn)全向移動(如前后直行、橫向平移、原地旋轉)的關鍵執(zhí)行部件。
- 核心結構與類型:
- 一個典型的驅(qū)動舵輪通常包含:驅(qū)動電機(提供扭矩)、減速機(放大扭矩)、轉向電機(控制輪子角度)、高精度編碼器(反饋輪速和轉角)、制動器以及承載輪體。
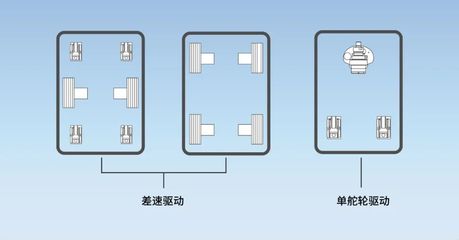
- 主要類型包括:差速舵輪(兩個獨立驅(qū)動的固定輪組合實現(xiàn)轉向)、麥克納姆輪(通過特殊輥子實現(xiàn)全向移動)、以及全向舵輪(如瑞典輪),其中單舵輪和雙舵輪(兩個驅(qū)動舵輪搭配多個萬向從動輪)是AGV中最常見的布局,能完美實現(xiàn)二維平面內(nèi)的任意方向移動和零半徑轉彎。
- 核心性能指標:
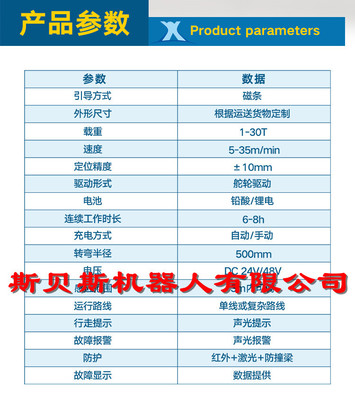
- 驅(qū)動性能:額定/峰值扭矩、速度范圍、爬坡能力。
- 轉向性能:轉向精度、響應速度、最大轉向角度(通常為±180°)。
- 可靠性:防護等級(IP評級)、耐久性、免維護周期。
三、 控制器與驅(qū)動舵輪的協(xié)同:閉環(huán)控制的藝術
二者的協(xié)同工作構成了一個精密的閉環(huán)控制系統(tǒng):
- 指令下發(fā):控制器根據(jù)導航算法計算出當前時刻每個驅(qū)動舵輪的目標線速度(v)和目標轉向角(θ)。
- 驅(qū)動執(zhí)行:驅(qū)動舵輪接收指令,其內(nèi)部的電機控制器(通常為伺服驅(qū)動器)驅(qū)動電機快速、精確地達到目標速度和角度。
- 實時反饋:舵輪上的編碼器將實際的速度和角度值實時反饋給機器人控制器。
- 糾偏調(diào)整:控制器比較目標值與實際反饋值,通過PID等控制算法計算出調(diào)整量,再次下發(fā)修正指令,如此循環(huán)往復,形成一個閉環(huán),確保機器人能夠沿著預定軌跡平穩(wěn)、精確地運動,即使在地面不平或有輕微滑移的情況下也能保持穩(wěn)定。
四、 選型與應用考量
在設計或選用機器人移動平臺時,需綜合考慮:
- 運動需求:是否需要全向移動?對轉彎空間、路徑精度有何要求?
- 負載與工況:機器人自重與載重多少?運行于平坦車間還是粗糙戶外?
- 控制復雜度:控制器的算力能否支持多舵輪協(xié)同的復雜解算?通信接口(CAN、EtherCAT等)是否匹配?
- 成本與可靠性:高性能的伺服舵輪和控制器成本較高,需在性能和預算間取得平衡。
###
機器人控制器與驅(qū)動舵輪是移動機器人“能動”且“智能”的根本。控制器的智能化程度決定了機器人的“智商”上限,而驅(qū)動舵輪的性能與可靠性則決定了其“體能”下限。兩者技術的不斷進步與深度融合,正推動著機器人從執(zhí)行固定路線的“自動導引車”向能夠自主適應復雜動態(tài)環(huán)境的“智能移動機器人”飛躍,為柔性制造、智慧物流打開更廣闊的空間。未來的發(fā)展趨勢將是更深度的一體化設計,即“控制驅(qū)動一體化”,實現(xiàn)更緊湊的結構、更低的延遲和更高的系統(tǒng)可靠性。
如若轉載,請注明出處:http://m.xinxinghong.com/product/23.html
更新時間:2026-06-02 04:23:04