多傳感數(shù)據(jù)融合技術(shù)在智能割草機(jī)器人自動(dòng)返回與驅(qū)動(dòng)舵輪協(xié)同控制中的應(yīng)用
隨著智能家居與智慧園林的快速發(fā)展,智能割草機(jī)器人正逐步成為現(xiàn)代庭院維護(hù)的核心工具。其中,自主工作完成后安全、精準(zhǔn)地返回充電樁(即“自動(dòng)返回”功能),是實(shí)現(xiàn)其完全自主化的關(guān)鍵一環(huán)。這一復(fù)雜任務(wù)高度依賴于環(huán)境感知、定位導(dǎo)航與運(yùn)動(dòng)控制的協(xié)同,而多傳感數(shù)據(jù)融合技術(shù)正是實(shí)現(xiàn)這一協(xié)同,并確保機(jī)器人高效、穩(wěn)定運(yùn)行的核心。
一、 自動(dòng)返回功能的挑戰(zhàn)與多傳感器需求
智能割草機(jī)器人的自動(dòng)返回功能,絕非簡(jiǎn)單的“原路返回”。它面臨幾大核心挑戰(zhàn):
- 精確定位:在非結(jié)構(gòu)化的庭院環(huán)境中,機(jī)器人需時(shí)刻知曉自身相對(duì)于固定充電樁的準(zhǔn)確位置。
- 路徑規(guī)劃與重規(guī)劃:庭院中可能存在臨時(shí)障礙(如兒童玩具、寵物),返回路徑需動(dòng)態(tài)避開(kāi)。
- 魯棒性與容錯(cuò):在部分傳感器受干擾(如GPS信號(hào)弱、視覺(jué)特征變化)時(shí),系統(tǒng)仍需可靠工作。
單一傳感器無(wú)法應(yīng)對(duì)所有挑戰(zhàn)。因此,現(xiàn)代智能割草機(jī)器人通常集成多種傳感器:
- 衛(wèi)星定位模塊(如GPS/RTK):提供全局絕對(duì)位置信息,但易受天氣、遮擋影響,精度有限。
- 慣性測(cè)量單元(IMU):提供高頻率的加速度、角速度信息,用于計(jì)算短時(shí)位移和姿態(tài),但存在累積誤差。
- 視覺(jué)傳感器(攝像頭):識(shí)別充電樁上的視覺(jué)信標(biāo)(如特定圖案、紅外燈)或環(huán)境特征,進(jìn)行相對(duì)定位和導(dǎo)航。
- 超聲波/紅外/激光雷達(dá)(LiDAR):用于近距離障礙物檢測(cè)和避碰,保障返回途中的安全。
- 里程計(jì)(通常來(lái)自驅(qū)動(dòng)輪編碼器):通過(guò)測(cè)量輪子轉(zhuǎn)速推算位移(航位推算),成本低但易受打滑影響。
二、 多傳感數(shù)據(jù)融合的實(shí)現(xiàn)架構(gòu)
為實(shí)現(xiàn)自動(dòng)返回,上述傳感器數(shù)據(jù)需通過(guò)融合算法整合成一個(gè)統(tǒng)一、可靠、高精度的狀態(tài)估計(jì)。主流架構(gòu)通常采用基于濾波的融合方法(如卡爾曼濾波及其變種擴(kuò)展卡爾曼濾波EKF、無(wú)跡卡爾曼濾波UKF)。其工作流程如下:
- 初始化與全局定位:機(jī)器人啟動(dòng)或完成任務(wù)時(shí),首先利用GPS或預(yù)先構(gòu)建的環(huán)境地圖(通過(guò)SLAM技術(shù))進(jìn)行粗定位,確定自身與充電樁的大致方位和距離。
- 傳感器數(shù)據(jù)預(yù)處理與特征提取:
- 攝像頭實(shí)時(shí)捕捉圖像,通過(guò)計(jì)算機(jī)視覺(jué)算法識(shí)別充電樁信標(biāo),計(jì)算出機(jī)器人與充電樁的相對(duì)角度和距離。
- IMU數(shù)據(jù)經(jīng)濾波后,提供精確的姿態(tài)(俯仰、橫滾、偏航)和短時(shí)運(yùn)動(dòng)變化。
- 里程計(jì)數(shù)據(jù)提供基礎(chǔ)的位移增量。
- 避障傳感器持續(xù)掃描前方路徑。
3. 多源數(shù)據(jù)融合與狀態(tài)估計(jì)(核心):
以擴(kuò)展卡爾曼濾波(EKF) 為例,它將機(jī)器人的狀態(tài)(位置、速度、姿態(tài))建模為一個(gè)動(dòng)態(tài)系統(tǒng)。
- 預(yù)測(cè)步驟:利用IMU和里程計(jì)的數(shù)據(jù)(作為系統(tǒng)輸入)預(yù)測(cè)機(jī)器人下一時(shí)刻的狀態(tài)。IMU彌補(bǔ)了里程計(jì)在高動(dòng)態(tài)運(yùn)動(dòng)(如轉(zhuǎn)彎)時(shí)姿態(tài)估計(jì)的不足,里程計(jì)則幫助校正IMU的漂移。
- 更新步驟:當(dāng)GPS信號(hào)可用或攝像頭識(shí)別到充電樁時(shí),將這些絕對(duì)或相對(duì)觀測(cè)信息與預(yù)測(cè)狀態(tài)進(jìn)行比較,計(jì)算卡爾曼增益,從而最優(yōu)地修正預(yù)測(cè)狀態(tài),顯著抑制單一傳感器的誤差。例如,當(dāng)進(jìn)入GPS信號(hào)盲區(qū)(如樹(shù)下),系統(tǒng)可依賴視覺(jué)+IMU+里程計(jì)的組合持續(xù)高精度定位。
4. 路徑規(guī)劃與運(yùn)動(dòng)控制:
融合后得到的精確位姿信息,輸入到路徑規(guī)劃模塊。規(guī)劃器(如基于柵格地圖或采樣的算法)生成一條無(wú)碰撞的、平滑的返回路徑。當(dāng)避障傳感器檢測(cè)到臨時(shí)障礙時(shí),規(guī)劃器會(huì)進(jìn)行局部重規(guī)劃,繞開(kāi)障礙后重新回歸主路徑。
三、 融合數(shù)據(jù)與驅(qū)動(dòng)舵輪的協(xié)同控制
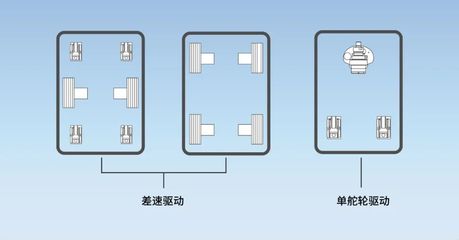
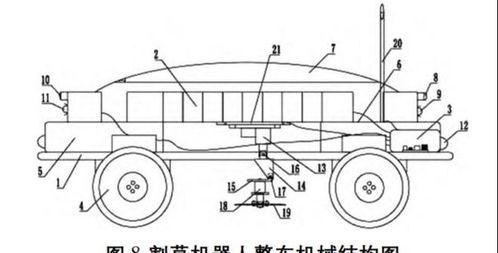
生成的路徑是一系列目標(biāo)點(diǎn)或目標(biāo)姿態(tài)。驅(qū)動(dòng)舵輪(通常是差速驅(qū)動(dòng)或全向輪結(jié)構(gòu))的執(zhí)行控制,是自動(dòng)返回的“最后一公里”。
- 運(yùn)動(dòng)學(xué)控制:控制器(如PID控制器)根據(jù)融合定位提供的實(shí)時(shí)位姿與路徑跟蹤誤差(橫向偏差、角度偏差),計(jì)算出左右驅(qū)動(dòng)輪的目標(biāo)速度或舵輪轉(zhuǎn)向角。
- 閉環(huán)反饋:驅(qū)動(dòng)輪上的編碼器(里程計(jì))將實(shí)際執(zhí)行的速度、轉(zhuǎn)角信息反饋給控制系統(tǒng),形成一個(gè)閉環(huán)。這個(gè)反饋數(shù)據(jù)同時(shí)也會(huì)被送入前述的多傳感器融合濾波器,作為狀態(tài)預(yù)測(cè)的重要輸入,實(shí)現(xiàn)了感知與執(zhí)行的深度耦合。
- 抗打滑與容錯(cuò):當(dāng)融合系統(tǒng)檢測(cè)到位移估計(jì)(來(lái)自視覺(jué)/GPS)與里程計(jì)推算出現(xiàn)較大不一致時(shí)(可能發(fā)生輪子打滑),可以識(shí)別出打滑事件,并及時(shí)用其他傳感器信息進(jìn)行校正,防止控制指令基于錯(cuò)誤位置而產(chǎn)生,確保機(jī)器人即使在小范圍打滑后仍能準(zhǔn)確駛向充電樁。
四、 與展望
在智能割草機(jī)器人中,自動(dòng)返回功能是一個(gè)典型的“感知-決策-控制”一體化應(yīng)用。多傳感數(shù)據(jù)融合技術(shù)通過(guò)算法層面對(duì)冗余、互補(bǔ)的傳感器信息進(jìn)行優(yōu)化整合,生成了遠(yuǎn)超任何單一傳感器的、穩(wěn)定可靠的定位與環(huán)境感知結(jié)果。這一結(jié)果不僅直接服務(wù)于全局和局部的路徑規(guī)劃決策,更通過(guò)閉環(huán)控制與驅(qū)動(dòng)舵輪的執(zhí)行機(jī)構(gòu)無(wú)縫銜接,最終實(shí)現(xiàn)了從庭院任意位置到充電樁的精準(zhǔn)、平滑、安全的自動(dòng)返回。隨著傳感器成本降低、算力提升以及更先進(jìn)的融合算法(如基于因子圖優(yōu)化、深度學(xué)習(xí)融合)的應(yīng)用,這一過(guò)程的智能化、自適應(yīng)性和可靠性將得到進(jìn)一步提升。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://m.xinxinghong.com/product/18.html
更新時(shí)間:2026-06-02 21:59:14